Iterations in Muscle Design
For the artificial muscles we used, the chirality of the coils decides whether the muscle extends or contracts. When the coils in the thread twist in the same direction as the fibers of the thread, the muscle contracts; this is easily obtained and produces a strong muscle, as this type of coil forms naturally when the thread is twisted under tension. We initially planned to use this type of muscle, but we soon realized it would not be possible: in order to embed in the manipulator so that it would contract under applied current, a certain amount of pretension was required. It was found that, with two muscles across from one another, the force generated by one muscle could not overcome the pretension of the other muscle without burning out, and therefore, the manipulator could not bend.
Instead, we chose to use extending muscles, which have coils that twist in the opposite direction of the twist in the fibers of the thread. These require manually wrapping the thread around a mandrel, or a very thin rod. This introduces an immediate disadvantage: as the diameter of coils increases, the force produced by the muscle decreases, and the smallest diameter we could obtain with the extending muscle was more than twice that of the contracting muscle. However, use of extending muscles eliminates the need for a pre-applied force in the silicone, and as a result, one muscle provides only negligible resistance to the extension of the other.
Still, muscles made with a single thread could not produce enough force to drive a manipulator into more than a small bend. First, we attempted embedding two separate muscles in each side of the manipulator, but as-yet-unavoidable variations between muscles caused irregular motion that we could not envision properly controlling.
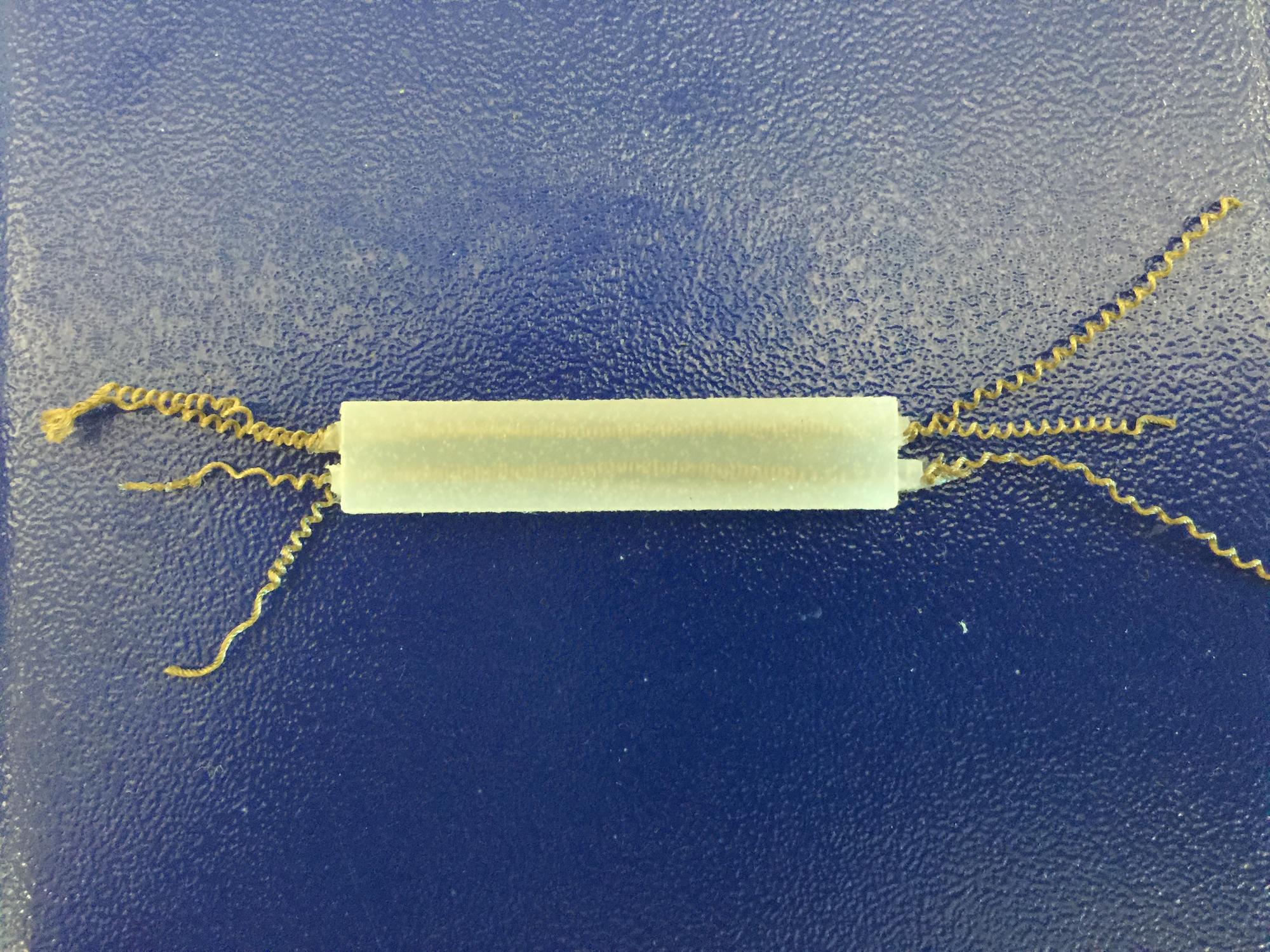
It was finally decided to produce a single muscle with two threads, effectively doubling the cross-sectional area of the muscle. These muscles, while more difficult to produce, are much stronger than single-thread muscles without introducing any uncontrollable irregularities in motion, and are what appear in the final iteration of the manipulator.
Contributors
David Trinko
Ali Abbas
Dr. Jianguo Zhao
Bibliography
F. Ilievski et al. (2011) Soft Robotics for Chemists
R. H. Baughman et al. (2014) Artificial Muscles from Fishing Line and Sewing Thread