Design
Motivation

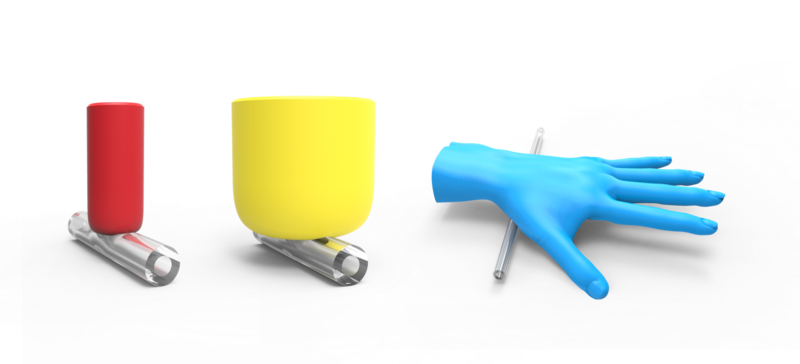
Soft robots rely on fluids for actuation through the modulation of pressure. Similarly, soft sensors rely on the same properties for measurement. However, while the fluids used in soft robotics are most likely to be either gaseous (air) or liquid (water), in most applications the fluid properties themselves e.g. electrical resistance or temperature are seldom exploited for sensing. Here, we present the idea of using multiple modalities of the fluid medium as a sensor to gain richer overall sensing capabilities. For instance, we might want to not only know the amount of force an object is applying to a soft sensor, but the size and shape of the object too. This guide presents a liquid based soft sensor capable of estimating both the force and area an object is acting upon it.
Concept
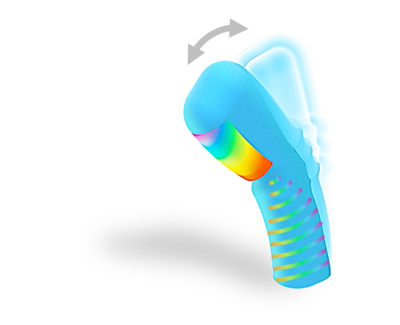
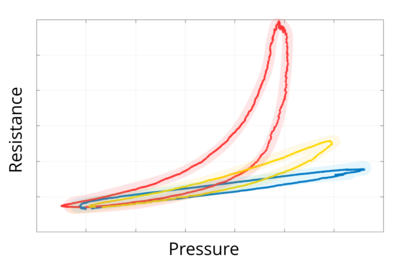
In soft robots that use fluid media to sense or actuate, the amount of force or deformation being subjected to it can be derived by measuring the pressure increase or decrease of the fluid medium. Another interesting property is the electrical resistance of the fluid medium. According to Pouillet's law \(R = \frac{\rho L}{A}\), assuming constant resistivity \(\rho\), the amount of resistance can vary from the amount of cross sectional area (\(A \)) change and length (\(L\)) in a resistive media. We exploit this property by using conductive fluid in the soft sensor, herein salt water. Measuring both resistance and pressure change, we can sense both the bulk deformation and change in cross sectional area, from which we can estimate the size or shape of the object the soft sensor is touching.
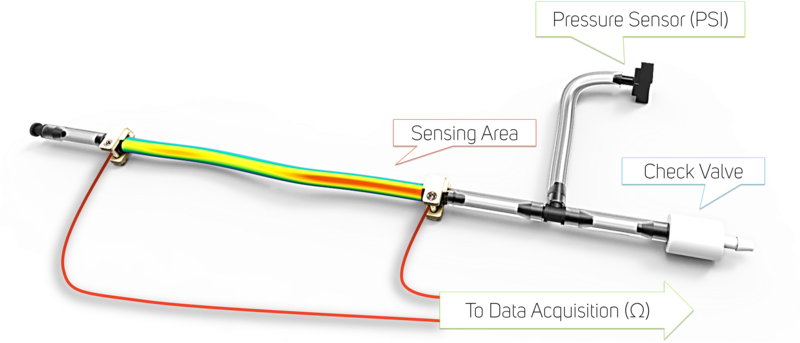
In its simplest form, the sensor can be a rubber tube with two conductive leads filled with salt water, as shown above. However, casting the sensor into more complex embodiments enables much more interesting uses.
Bibliography
Preechayasomboon et. al. Multi-Modal Sensing and Actuation in Biomechanical Hydraulic and Pneumatic Systems.
Contributors
Pornthep Preechayasomboon
Gaurav Mukherjee
Eric Rombokas