Step 2: Sensor Body

The sensor body is simply casted from silicone with embedded conductive interfaces at the ends.
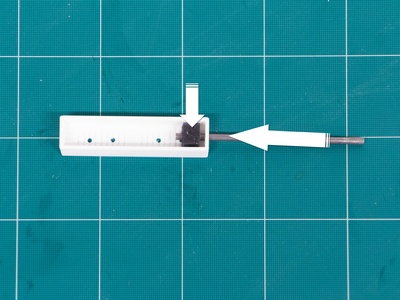
| Prepare the mold by inserting the 4 mm steel rod and suspending the conductive rubber ends at both ends of the mold. |
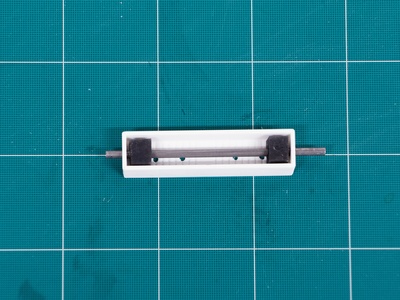
| Leave small gaps between the end of the mold and the conductive rubber as shown. |
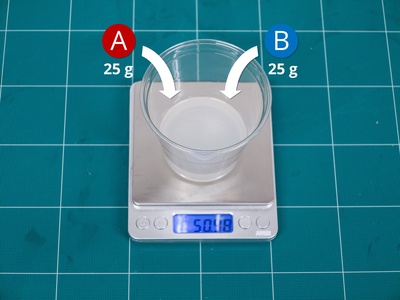
| Pour 25 g each of Part A and Part B of the silicone rubber (PlatSil Gel-25) to a total of 50 g into a mixing cup. |

| Stir the mixture. Periodically scrape the sides and bottom of the cup to ensure proper mixing. Please take into account the limited pot life of 5 minutes of the mixture. Vacuum degassing of the mixture is suggested but not required. |

| Pour the silicone rubber mixture into the mold up to the brim. Tap the bottom of the mold against a table repeatedly to remove any large air bubbles trapped inside. Wait for the silicone rubber to completely cure. |

| Remove the 4 mm steel rod by either twisting it out with a pair of pliers or securing the rod in a vise and twisting out the mold. After the rod is removed, demold the sensor body from the mold using a small tool to pry out the sensor at the ends of the mold. |
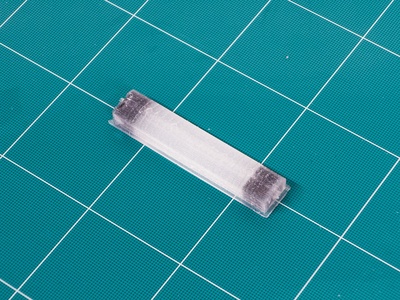
| The completed sensor body |
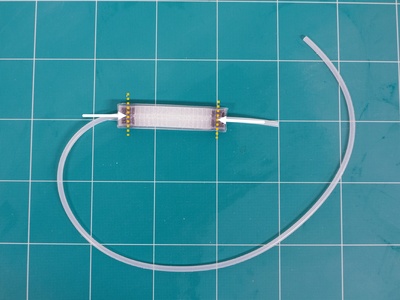
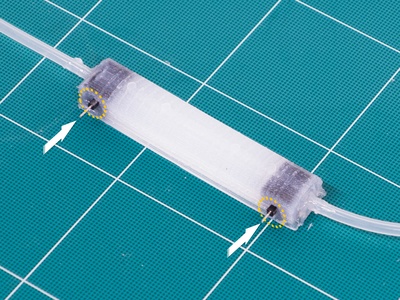
| Cut the silicone tubes into 40 cm and 5 cm long sections and insert them into the sensor body as shown. Insert the end of the tubes only up until half of the length of the conductive rubber. Inserting the tube in too far might cover up the whole area of the conductive rubber in contact with the salt water, rendering the conductive rubber useless. |
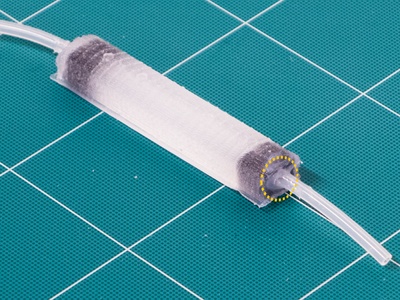
| Apply liberal amounts of silicone adhesive (Sil-Poxy) at the ends of the sensor body and let dry. Any outer voids from the molding process can also be patched up at this point. |
| Insert the male 0.254" pins with the short side facing the sensor as shown. Glue the pins in place with silicone adhesive. |
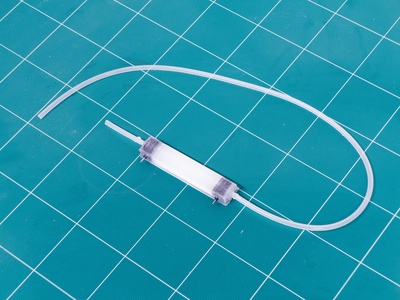
| Once the adhesive has dried, the sensor is complete and ready to be charged with conductive fluid. |
Bibliography
Preechayasomboon et. al. Multi-Modal Sensing and Actuation in Biomechanical Hydraulic and Pneumatic Systems.
Contributors
Pornthep Preechayasomboon
Gaurav Mukherjee
Eric Rombokas