Design
This project consists of the development of a soft manipulator based on antagonistic actuation capable of bending and extension with a certain degree of stiffness control. It makes use of a hybrid actuation system composed of pneumatic and tendon-based actuators.
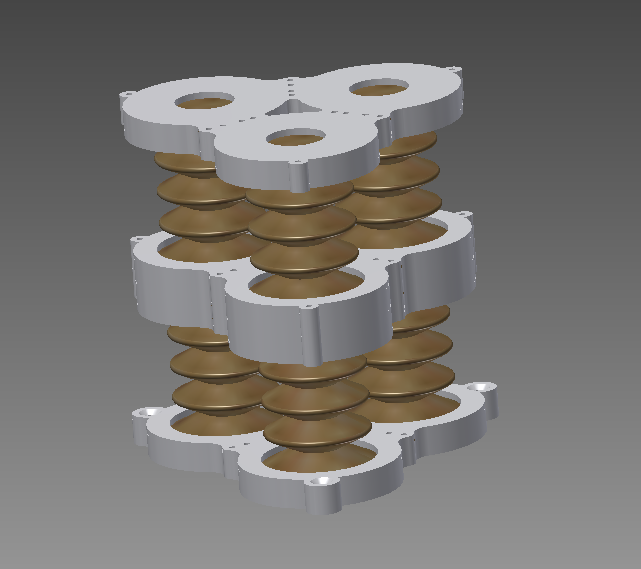
This section presents the design of each part that compose the robot, while providing the operation principles that led to that particular design.
Bibliography
Robinson et al. (1999) Continuum robots-a state of the art
Walker et al. (2013) Continuous backbone “continuum” robot manipulators
McMahan et al. (2005) Design and implementation of a multi-section continuum robot: Air-Octor
Neppalli et al. (2007) Design, construction, and analysis of a continuum robot
Bosman et al. (2015) Domain decomposition approach for FEM quasistatic modeling and control of Continuum Robots with rigid vertebras
Duriez, et al. (2008) Contact skinning
Duriez et al. (2013) Control of elastic soft robots based on real-time finite element method
Contributors
Thor Bieze
Frédérick Largillière
Sandra Hage Chehade
Mario Sanz Lopez
Christian Duriez