Design of a Stewart platform like section
To achieve bending in our robot, three actuators are arranged in parallel configuration as one section of the manipulator. A rigid platform at the end of the array holds the actuators in place. By applying different pressure values to each actuator, we can displace or orientate this platform.

When differential pressures are applied to the actuators of one section, the top platform is oriented in different ways. If equal pressure is applied to all the actuators, the manipulator elongates longitudinally.
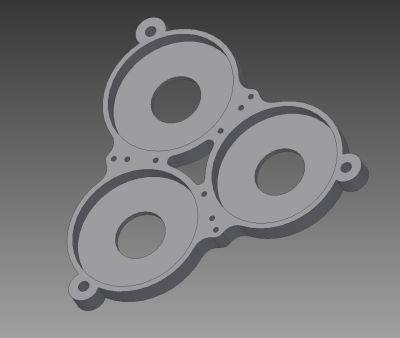
The design of the platform is very simple. It is composed of 3 sockets that receive the actuators and hold them in place. A hole at the bottom of each socket provides the necessary space to connect a plastic tube, from the air supply to the actuator, and a central hole in the platform allows us to pass the tube that will supply the air to the actuators of the second section. Smaller holes located between the sockets serve as cable guides for the tendons.
The manipulator is composed by serially connecting two sections. The pose of the manipulator is controlled by six pneumatic inputs, while the stiffness is controlled by six antagonist cable actuators. These cables run along the same direction of the pneumatic actuators and pass through holes in the rigid platform. The cables are positioned carefully to avoid contact with the pneumatic actuators and minimize the friction during bending.
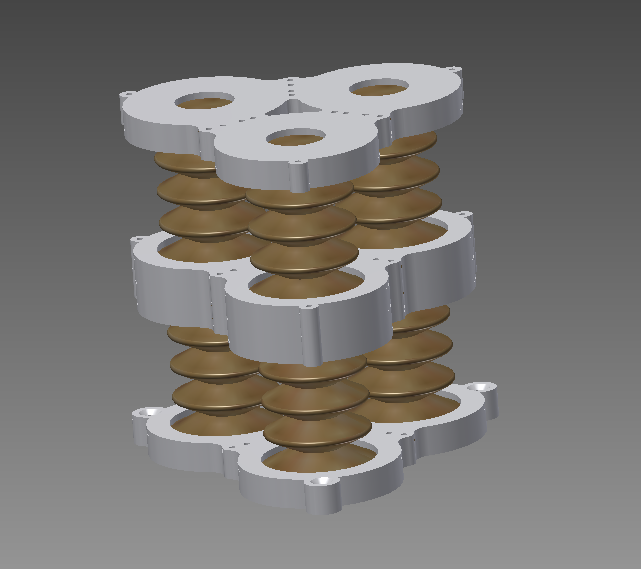
Once the behavior of one section of the manipulator was proven, another simulation was made to include both sections to better picture the behavior of the whole manipulator.
Bibliography
Robinson et al. (1999) Continuum robots-a state of the art
Walker et al. (2013) Continuous backbone “continuum” robot manipulators
McMahan et al. (2005) Design and implementation of a multi-section continuum robot: Air-Octor
Neppalli et al. (2007) Design, construction, and analysis of a continuum robot
Bosman et al. (2015) Domain decomposition approach for FEM quasistatic modeling and control of Continuum Robots with rigid vertebras
Duriez, et al. (2008) Contact skinning
Duriez et al. (2013) Control of elastic soft robots based on real-time finite element method
Contributors
Thor Bieze
Frédérick Largillière
Sandra Hage Chehade
Mario Sanz Lopez
Christian Duriez