Model and Control
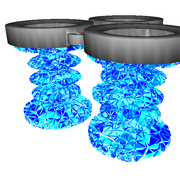
The robot is composed of 6 pneumatic actuators and 6 cables. The robot is thus highly redundant and composed of hybrid actuation.
To drive the 12 actuators in a coherent manner, a new approach is needed for control. Bosman et al. recently proposed a method dedicated to continuum robots with rigid vertebrae. One important contribution of this work is to demonstrate that the method of control can be extended to hybrid and redundant actuation.
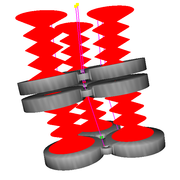
The first step of the method is to build a detailed FEM model of one intervertebra attached to a vertebra. For that, we use SOFA and the plugin dedicated to soft robots. The simulation is able to mix deformable and rigid parts, thanks to a generic definition of the degrees of freedom available on SOFA platform.
The second step is the heart of the method: to avoid computation burden and allow for real-time computation of the robot model, we use a model reduction method based on a domain decomposition approach. The algorithm computes the equivalent non-linear stiffness of the intervertebra.
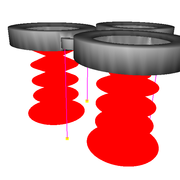
The third step consists in building a simplified model of the whole robot and placing the cables. To compute a motion of the cavities with no precise simulation of the intervertebra (because we are using a simplified model), we use a technique often used in computer graphics that is called skinning. From the 6D frame of each intervertebra, the skinning provides a deformable motion of the inner cavity. In SOFA, we can reverse this skinning as done in [Duriez et al 2008] to compute the equivalent force on the frame, due to the pressure applied on cavity walls.
The last step is to launch the inverse control method, presented in [Duriez 2013] and extended in [Bosman et al. 2015]. It consists on inverting the deformable model, thanks to an optimization method and finding the actuator value given the desired position of the effector (here we control all the degrees of freedom (DOF) of the effector, except the twist, so 5DOF). As the robot is highly redundant, we add more criteria in the optimization to get a single solution to the problem: the method minimizes the pressure value (to put as little pressure as possible in the cavities) and it also minimizes the energy of deformation.
Bibliography
Robinson et al. (1999) Continuum robots-a state of the art
Walker et al. (2013) Continuous backbone “continuum” robot manipulators
McMahan et al. (2005) Design and implementation of a multi-section continuum robot: Air-Octor
Neppalli et al. (2007) Design, construction, and analysis of a continuum robot
Bosman et al. (2015) Domain decomposition approach for FEM quasistatic modeling and control of Continuum Robots with rigid vertebras
Duriez, et al. (2008) Contact skinning
Duriez et al. (2013) Control of elastic soft robots based on real-time finite element method
Contributors
Thor Bieze
Frédérick Largillière
Sandra Hage Chehade
Mario Sanz Lopez
Christian Duriez