Design
Soft Bidirectional Bending Actuator
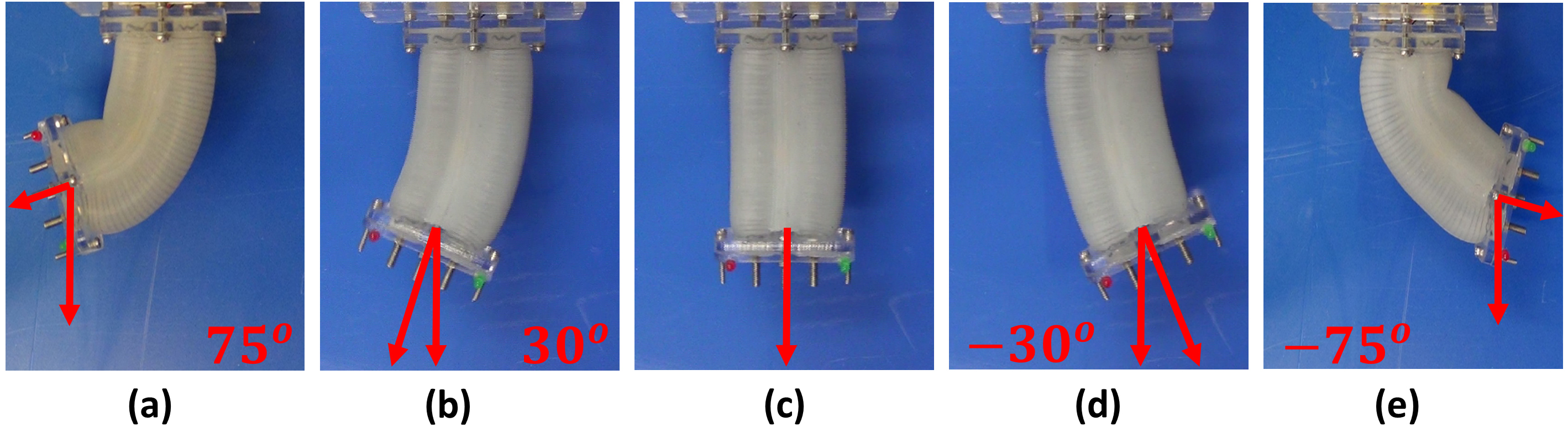
Our soft bidirectional bending actuator consists of two chambers each wrapped in a double-helix of thread mounted on either side of an inextensible constraint layer (Figure.2). Each chamber is connected to an external air supply, and when pressurized causes the segment to curve in the opposite direction. The central constraint layer contains a flexible curvature sensor which measures the kinematic state of the actuator. Figure.3 shows the static behavior of our bending module.

Curvature Sensor
Our curvature sensor contains a miniature magnet and a Hall effect measurement integrated circuit (IC). The magnet is positioned in a specific way with respect to the Hall element on a flexible cirucit to measure the curvature of bidirectional out-of-plane deformations in a standalone package, without the need for external electronics (Figure.4).
