Modeling and Design Tool for Soft Pneumatic Actuators
Soft actuators are an integral component of soft robotic systems. Although the scalability, customizability, and diversity of soft pneumatic actuators (SPA) are widely recognized, comprehensive techniques for modeling and designing soft actuators are lacking. Characterizing and predicting the behavior of soft actuators is challenging due to the nonlinear nature of the materials used and the large range of motions they produce. In this work, mathematical tools and new design concepts are employed to improve the performance of these actuators compared to existing designs. A comprehensive, cohesive, and open-source simulation and design tool for soft actuators using the finite element method (FEM) has been developed, readily compatible with and extensible to a diverse range of soft materials and design parameters. This design tool can enable the generation of improved predictive models that will help us to rapidly converge on new and innovative applications of these soft actuators.
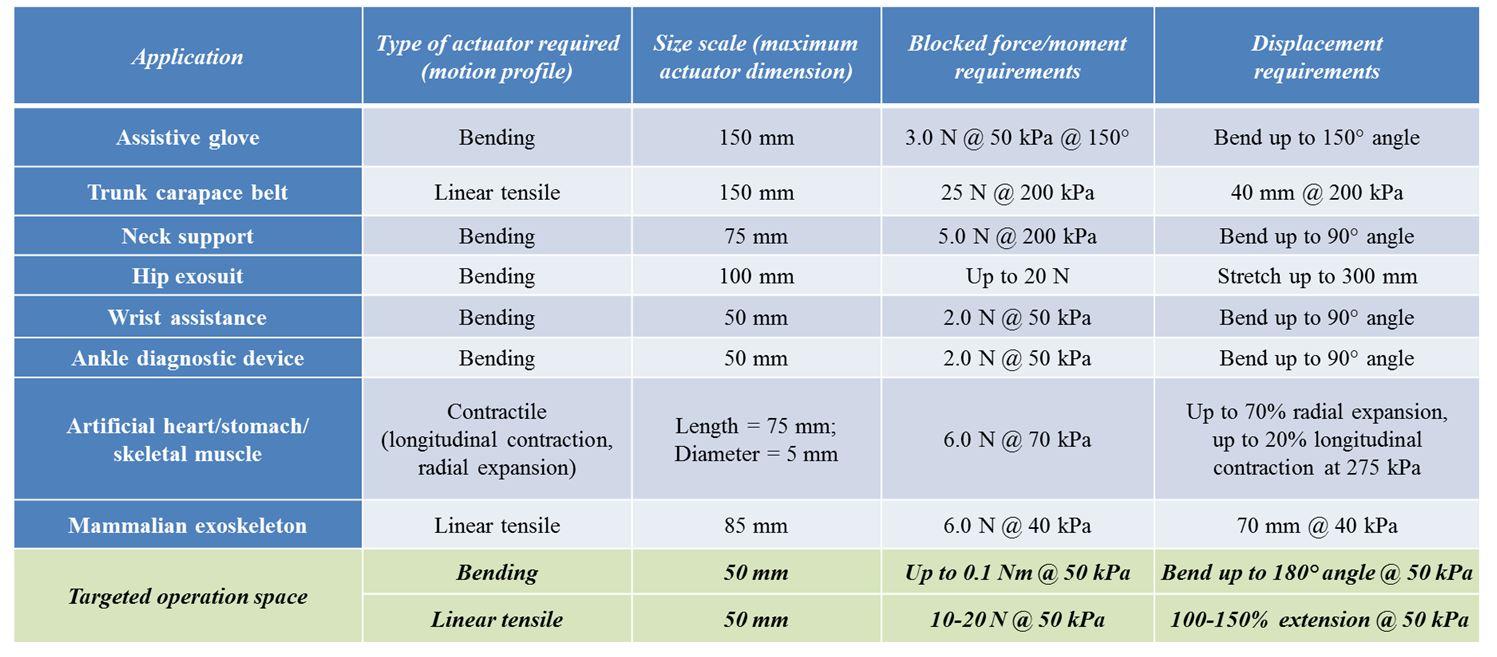
Table showing SPA applications in assistive wearable devices for biomedical assistance along with corresponding design requirements, achievable using the modeling and design tool presented.
Thorough characterization of the hyperelastic and viscoelastic behavior is illustrated using a sample soft material (Ecoflex 00_30), and an appropriate material constitutive law. SPA performance (displacement and blocked-force) are simulated for two types of SPA and validated with experimental testing. Real-world case studies are also presented in which SPA designs are iteratively optimized through simulation to meet specified performance criteria and geometric constraints.
Numerical simulation results using Finite Element Analysis (FEA) for soft actuators in bending and linear motion. Simulations predict motion-force profiles obtained with the actuators, enabling the design of more efficient systems.

The videos below show simulations developed using the FEM for soft pneumatic actuators in linear and bending motion. In these simulations, the soft actuator core is covered with a stiffer shell structure that has a pre-specified pattern on it to guide the motion of the actuator along a prescribed trajectory.
Bibliography
Agarwal et al. (2016) Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices
Moseley et al. (2015) Modeling, Design, and Development of Soft Pneumatic Actuators with Finite Element Method
Sonar et al. (2016) Soft Pneumatic Actuator Skin with Piezoelectric Sensors for Vibrotactile Feedback
Paez et al. (2016) Design and Analysis of a Soft Pneumatic Actuator with Origami Shell Reinforcement
Contributors
Dr. Philip Moseley
Dr. Juan Florez
Harshal Sonar
Prof. William Curtin
Prof. Jamie Paik