1. Shell-reinforced SPA
Despite the established potential of SPAs and their diverse implementation towards robotic systems for meeting desired functional requirements in crucial applications such as the ones described above, the lack of repeatability in currently existing SPA design and fabrication procedures greatly limits their potential and performance in such systems.
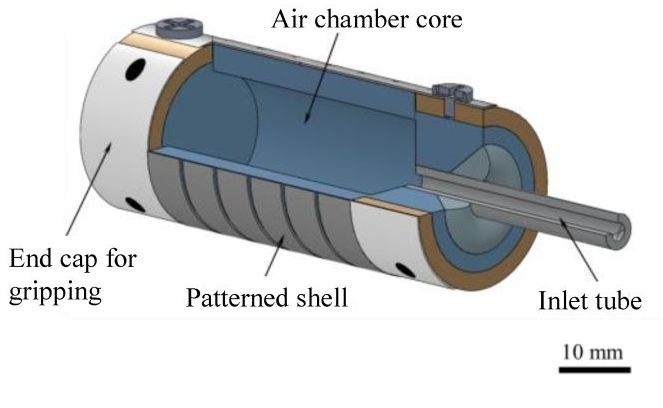
In an effort to circumvent some of these fabrication and repeatability issues, a new actuator design has been developed where the actuators are made in a single molding step. The presented two-part, shell-reinforced, SPA design shown below allows “fool-proof” prototyping of both bending and linear actuators and produces results in the desired performance range.
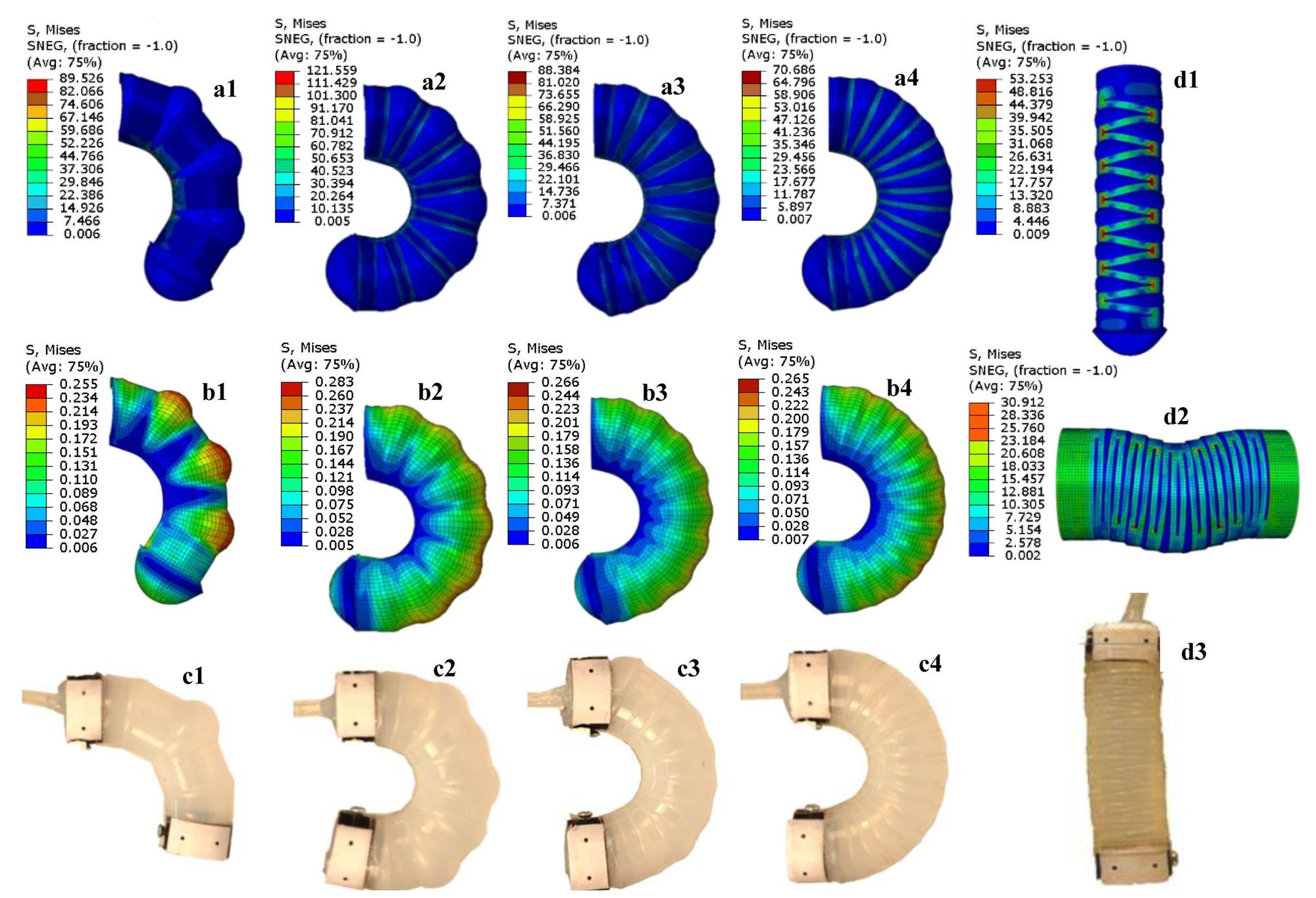
The presented numerical models using FEA accurately predict the complex mechanical response and the performance obtained with the designed actuators while allowing rapid design iterations to optimize the design parameters. The following images show the simulation results obtained for bending and linear shell-reinforced actuators using the design tool along with the corresponding experimental images. The design and modeling procedures for these actuators are listed step-by-step and illustrated in detail in the Model Demo Section.
The design tool and a complete set of models used in the current study are also available open-source on the Reconfigurable Robotic Laboratory website (http://rrl.epfl.ch) where it is possible to use the models developed in the present work as a starting point to modify and create different geometries and materials for any robotic application.
Bibliography
Agarwal et al. (2016) Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices
Moseley et al. (2015) Modeling, Design, and Development of Soft Pneumatic Actuators with Finite Element Method
Sonar et al. (2016) Soft Pneumatic Actuator Skin with Piezoelectric Sensors for Vibrotactile Feedback
Paez et al. (2016) Design and Analysis of a Soft Pneumatic Actuator with Origami Shell Reinforcement
Contributors
Dr. Philip Moseley
Dr. Juan Florez
Harshal Sonar
Prof. William Curtin
Prof. Jamie Paik