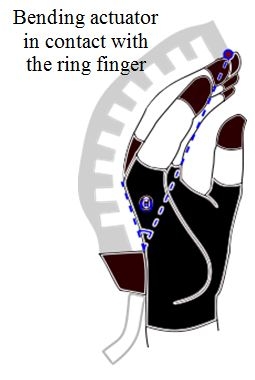
Case Study 2: Bending SPA Design for Hand Rehabilitation Glove
The compliant and light-weight SPAs have applications in actuated gloves for rehabilitation and assistance of patients suffering from reduced mobility and strength. Currently, these gloves use bending SPAs. The actuators can apply force during flexion or extension, allowing the glove to support a wide range of functional rehabilitation tasks.
Our goal for the rehabilitative glove focuses on the repetitive training of isolated movements for functional activities of daily living (ADL). A number of hand studies in the literature provide measurements of required range of motion of the joints in the hand (i.e., grip angle of finger) and pinching forces required for a large range of functional tasks in ADL, and the requirements considered here are summarized in Table 1. The initial and optimized design parameters from the simulation are summarized in Table 2. The other four initial designs are not tested, as the simulation results already indicated that those designs were too far from meeting the requirements.
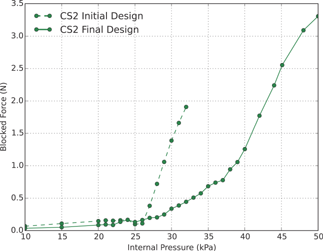
Results from the experimental testing of the initial and final design parameters are shown in Table 3 and in Figure below. The initial design bursts at 32 kPa before reaching the desired force at the grip angle of 150°. The sample based on the optimized parameters achieved goal force and stayed close to the simulation results.
Bibliography
Agarwal et al. (2016) Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices
Moseley et al. (2015) Modeling, Design, and Development of Soft Pneumatic Actuators with Finite Element Method
Sonar et al. (2016) Soft Pneumatic Actuator Skin with Piezoelectric Sensors for Vibrotactile Feedback
Paez et al. (2016) Design and Analysis of a Soft Pneumatic Actuator with Origami Shell Reinforcement
Contributors
Dr. Philip Moseley
Dr. Juan Florez
Harshal Sonar
Prof. William Curtin
Prof. Jamie Paik