Case Study 1: Linear SPA Design for Soft Exoskeleton
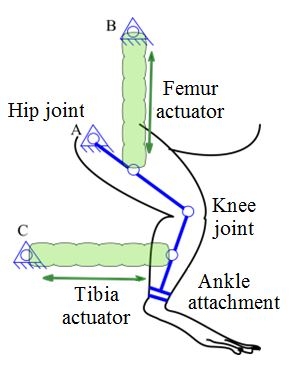
A SPA-driven exoskeleton designed for locomotor rehabilitation of mammals with neurological disorders is modeled using the SPA design tool. The soft exoskeleton is designed to guide the limbs of a rodent subject through a controlled, predefined trajectory defining a step, with motion occurring solely in the saggital plane. SPAs were chosen over electrical motors to maximize the agility of the subject during the spastic motion of the limbs. The mechanism is composed of two linear SPAs attached to a two-link chain, as shown in Figure below.
The required displacement and blocked-force are summarized in Table 1. A maximum strain constraint is also included in the optimization in order to avoid the high-strain regimes where failure occurs in the real-world. This constraint is applied as an optimization penalty for strains above the upper limit.
Table 1. Design requirements for Case Studies 1 and 2. The constraints and performance criteria are defined based on the application requirements. In Case Study 2, the actuator is allowed free displacement up to 150, beyond which the actuator is blocked in order to measure blocked-force.

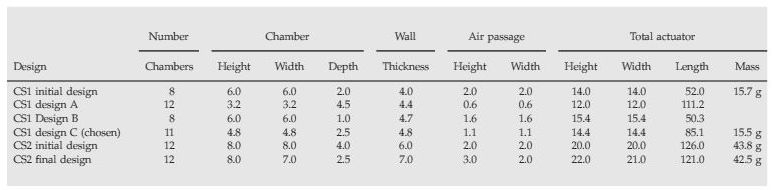
The initial design parameters of the linear SPA were based on intuition and are shown in Table 1. These values serve as the optimization starting values. The geometric parameters to be optimized are the number of chambers, chamber height × width × depth, wall thickness, and inter-chamber air passage height × width. These seven parameters are reduced to five by constraining the chambers and passages to remain square (height equals width). With these five geometric parameters and the criteria and constraints in Table 1, the spa_optimize_geometric_parameters tool is able to converge toward an optimal SPA design. A plot of the performance of various designs during the optimization loop is shown below.
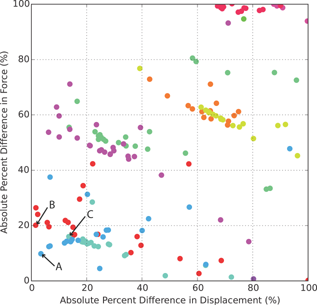
The plot shows three design-groupings (blue, red, and blue-green) generally provide the best displacement and force performance. The best result from each of these design groups is marked in the figure and the corresponding design parameters are given in Table 2. It is clear that the starting point, noted as “CS1 Initial” in Table 2, formed the basis for the red group of results. The optimization process was able to improve on this initial design by thickening the walls, decreasing the size of the inter-chamber tube, and reducing the depth of the chambers to improve performance. The other two designs in Table 2 are significantly different from the initial design, based on longer, thinner actuator designs determined by the basin-hopping algorithm.
Table 2. Design parameters for Case Studies 1 and 2. The initial SPA designs were built using intuition, all other designs are generated by the FEA optimization tool. Lengths in mm, masses measured experimentally on fabricated actuators.
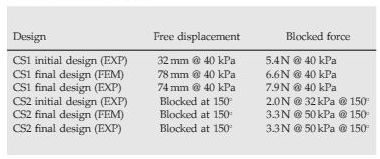
These three actuators were then fabricated and tested. Values from experimental testing of the initial and final designs are shown in Table 3. The rapid exploration of the solution space shown here represents a major improvement in the design procedure. We can rapidly explore non-evident SPA configurations, rather than simply iterating experimentally one factor at a time based on intuition design decisions.
Table 3: Performance results for Case Studies 1 and 2 on the initial and final designs, showing both experimental (EXP) and simulation (FEM) values determined using optimization.
Bibliography
Agarwal et al. (2016) Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices
Moseley et al. (2015) Modeling, Design, and Development of Soft Pneumatic Actuators with Finite Element Method
Sonar et al. (2016) Soft Pneumatic Actuator Skin with Piezoelectric Sensors for Vibrotactile Feedback
Paez et al. (2016) Design and Analysis of a Soft Pneumatic Actuator with Origami Shell Reinforcement
Contributors
Dr. Philip Moseley
Dr. Juan Florez
Harshal Sonar
Prof. William Curtin
Prof. Jamie Paik