2. Multi-Chamber SPA
The open-source downloadable scripts available with the design tool enable automation of the design and modeling procedure for the classical multi-chamber SPAs. The following design capabilities are supported by the tool:
1. Creation of desired geometry for the actuator. Currently, linear and bending motion profiles are supported by the tool. The user can specify the number of air chambers desired, dimensions of chambers, connecting passage dimensions, wall thickness etc. as input parameters and a ready to use Abaqus INP file with the specified geometry is generated.
2. Characterization of hyperelastic and viscoelastic soft material effects. These effects are demonstrated here with a typically used silicone elastomer material to fabricate SPAs - Ecoflex 00-30, which exhibits desirable mechanical behavior for soft robotic components. The tool fits experimentally gathered stress-strain data on the elastomer collected through multiple mechanical tests to a hyperelastic stress-strain constitutive law. Multiple commonly used hyperelastic stress-strain constitutive laws are supported. Time dependent effects can also be included by fitting experimental stress-relaxation data collected through prescribed tests to a viscoelastic Prony series describing stress relaxation effects within the material.
3. Finite element procedures for modeling SPAs. The scripts automate procedures such as generation of INP file, meshing the actuators, desired pressure load application, specifying the necessary boundary conditions depending on the application and testing conditions for the actuator and generating the mesh desired. The model results are plotted using another script and the results can be simulataneously validated against experimental prototype results, for linear and bending actuators. Optimization of actuator parameters to meet targeted metrics is also possible.
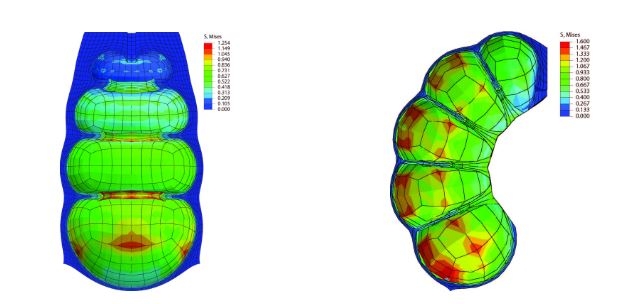
These procedures are illustrated step-by-step in the Model Demo Section. The following images show the simulation results obtained for bending and linear shell-reinforced actuators using the design tool.
Bibliography
Agarwal et al. (2016) Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices
Moseley et al. (2015) Modeling, Design, and Development of Soft Pneumatic Actuators with Finite Element Method
Sonar et al. (2016) Soft Pneumatic Actuator Skin with Piezoelectric Sensors for Vibrotactile Feedback
Paez et al. (2016) Design and Analysis of a Soft Pneumatic Actuator with Origami Shell Reinforcement
Contributors
Dr. Philip Moseley
Dr. Juan Florez
Harshal Sonar
Prof. William Curtin
Prof. Jamie Paik