Variation: Morphology
Cross-section type
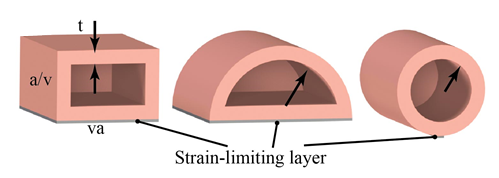
Three common cross-sectional shapes seen in soft actuators are rectangular, circular, and semi-circular. Assuming identical wall thicknesses and cross-sectional areas, we have found the following:
- The circular actuator is capable of applying the most bending torque for a given pressure, but it also has a high resistance to bending, making it the least efficient of the three shapes.
- The rectangular and semi-circular shapes have roughly similar efficiency. However, the rectangular cross-section deforms into a quasi-circular shape when pressurized, while the other two cross-section types maintain their original shapes.
- The sharp corners of the rectangular actuator may also increase the potential for stress concentrations and resulting fatigue/failure.
Radius, wall thickness, length

a) Increasing the radius of the actuator's semi-circular cross-section decreases the pressures required for the actuator to achieve a given amount of bending (in degrees). In addition, actuators with a larger radius (all other parameters being equal) achieve higher tip forces at a given pressure.
b) Longer actuators require lower pressures to achieve the same amount of bending as their shorter counterparts. However, length did not greatly affect the force exerted at the actuator tip for a given pressure.
c) Increasing wall thickness increases the pressures required for the actuator to achieve a certain amount of bending
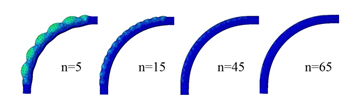
Fiber wrapping spacing
As the spacing of the fiber wrapping gets closer together (increasing turn number n), lower pressures are needed to achieve the same amount of bending. At low turn numbers with fibers spaced far apart, significant bulging and radial expansion is observed in the area between threads.
Bibliography
Galloway et al. (2013) Mechanically programmable bend radius for fiber-reinforced soft actuators.
Maeder-York et al. (2014) Biologically Inspired Soft Robot for Thumb Rehabilitation.
Connolly et al. (2015) Mechanical Programming of Soft Actuators by Varying Fiber Angle
Connolly et al. (2016) Automatic Design of Fiber-Reinforced Soft Actuators for Trajectory Matching
Contributors
Panagiotis Polygerinos
Kevin Galloway
Zheng Wang
Fionnuala Connolly
Johannes T B Overvelde
Harrison Young