Variation: Motion
By varying the configurations of the strain-limiting components of the actuator (the inextensible layer and fiber wrapping), different motions can be achieved when the actuator is inflated. Here, we discuss how to achieve three types of motion: bending, twisting, and extension. These motion types can be combined, for example it is possible to design an actuator that will bend and twist when inflated. Furthermore, it is possible to vary the strain-limiting configuration along the length of a single actuator so that different behaviors can be achieved at different locations. See the case study for an example application of this approach.
Bending

By wrapping the fiber reinforcement in a symmetrical, double-helix configuration, the actuator is prevented from expanding radially and can only expand axially. The addition of a strain-limiting sheet of inextensible material prevents this expansion on one side of the actuator, resulting in an overall bending motion.
Extending

Again, a symmetrical, double-helical fiber wrapping limits radial expansion. However, in this configuration we do not add an inextensible layer and as a result the actuator will expand in the axial direction when inflated.
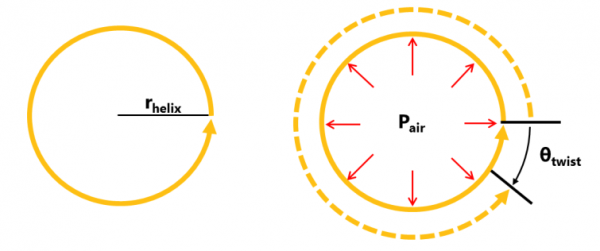
Twisting
By using a single helical wrapping instead of a symmetrical double helical wrapping like in the above 2 cases, a twisting motion can be achieved. As the elastomer core expands, the thread helix also increases in diameter. But since the thread is inelastic and fixed in length, the diameter increase must be compensated by a reduction in the number of coils – resulting in a twisting motion opposite to the direction of thread wrapping.
Twisting and Bending
Single-helical fiber wrapping combined with a strain-limiting layer results in twisting and bending.

Twisting and Extending
Single-helical fiber wrapping with no strain-limiting layer results in bending and axial expansion.

Combining multiple behaviors
The actuator can be divided into segments, with each segment having a different motion type. This enables the design of more complex and customized actuator behaviors. In the example shown, when the actuator is inflated the left-hand segment will bend, the central segment will extend in the axial direction, and the right-hand segment will twist and bend. The ability to "pre-program" complex behaviors like this is one of the primary advantages of soft robotics over traditional rigid robotics.


Bibliography
Galloway et al. (2013) Mechanically programmable bend radius for fiber-reinforced soft actuators.
Maeder-York et al. (2014) Biologically Inspired Soft Robot for Thumb Rehabilitation.
Connolly et al. (2015) Mechanical Programming of Soft Actuators by Varying Fiber Angle
Connolly et al. (2016) Automatic Design of Fiber-Reinforced Soft Actuators for Trajectory Matching
Contributors
Panagiotis Polygerinos
Kevin Galloway
Zheng Wang
Fionnuala Connolly
Johannes T B Overvelde
Harrison Young