Testing Manipulator’s Performance
The HPN manipulator’s performance shows great flexibility, load bearing capacity and ability to interface safely with humans. In the figure, (A) shows a process of grasping a ball by the HPN manipulator where it performs high compliance and flexibility; the manipulator exhibits high degrees of freedom as well as stability during movements in a fetching process in (B); (C) demonstrates a process of fetching a hammer and passing it to a man by the HPN manipulator, which shows proper load bearing capacity and cooperation ability.
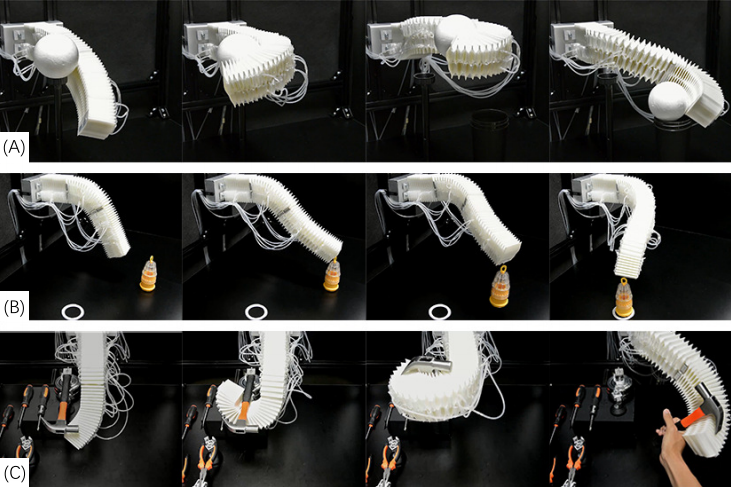
Details: In (A), the manipulator first moves close to the ball, and then gradually bends to grasp it. After that, the manipulator bends to the opposite direction and place that ball on the top of a bottle. In (B), the manipulator first move a position where its tip can exactly hook the vial through a hole of only 1cm2. Then it stably moves towards the destination, adjusts the position elaborately and puts it down. In (C), the manipulator first bends downwards using its fourth segment, and then bends left to grasp a hammer, after that, it tightens and passed that hammer to a person by bending right using its root segment.