Groove on the Corner
As discussed before, there are two parameters affecting the mechanical property of the manipulator: wall thickness and groove depth of the honeycomb structure. In this step, we will implement 2 mm depth grooves in sketch.
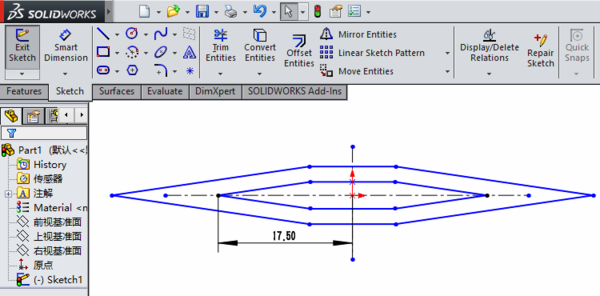
Below is the single chamber finished in last step.
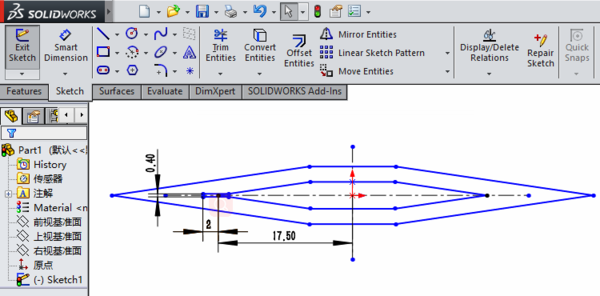
We draw a rectangle with a depth of 2 mm and a width of 0.4 mm at the inner acute angle.
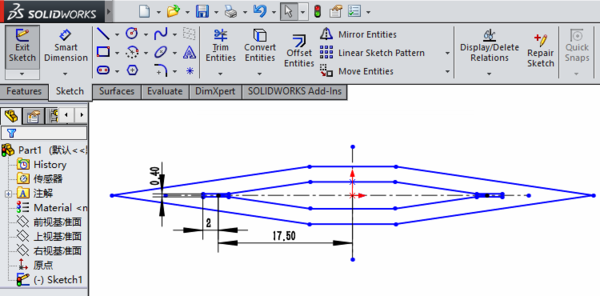
Then we obtain grooves on two sides using the Mirror Entities operator.
Bibliography
Jiang et al. (2016) Design and Simulation Analysis of a Soft Elastomer Manipulator based on Honeycomb Pneumatic Networks.
Sun et al. (2016) FLEXIBLE HONEYCOMB PNEUNETS ROBOTS.
Jiang et al. (2017) A Two-Level Approach for Solving the Inverse Kinematics of an Extensible Soft Arm Considering Viscoelastic Behavior.
Jiang et al. (2016) Design and Simulation Analysis of a Soft Manipulator Based on Honeycomb Pneumatic Networks.
Giri et al. (2010) Continuum robots and underactuated grasping
Grissom, et al. (2006) Design and experimental testing of the OctArm soft robot manipulator.
Contributors
Hao Jiang
Zhanchi Wang
Xinghua Liu
Xiaotong Chen
Yusong Jin
Hao Sun
Xiaoping Chen