Pneumatic Networks

The pneumatic network is an important part of HPN manipulator. In this section, we will introduce an innovative design of this proposed pneumatic network.
Conventionally, when we talk about the pneumatic network, the first idea is a series of chambers connected together through specific designed channels (click here to see an example). This is a bottom-up way to build the whole structure from fragments. In the following paragraph, we will introduce the method in which to construct the pneumatic network, which is low cost and durable. The main part of pneumatic network we put here is air columns bag made of PA/PE, which has many advantages listed as follows:
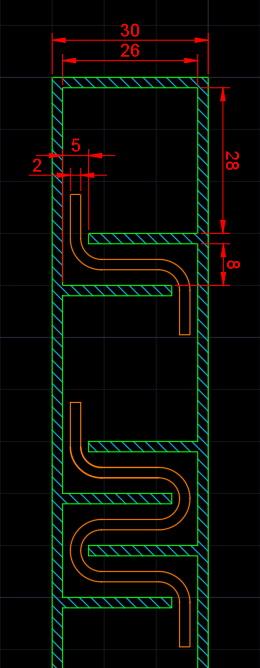
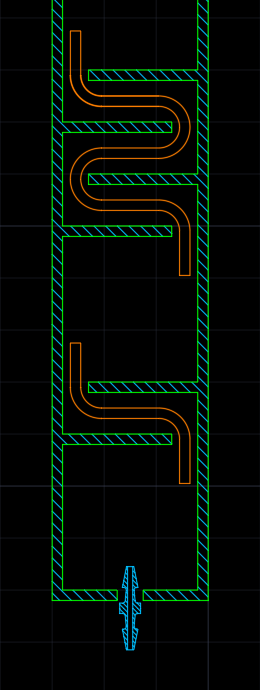
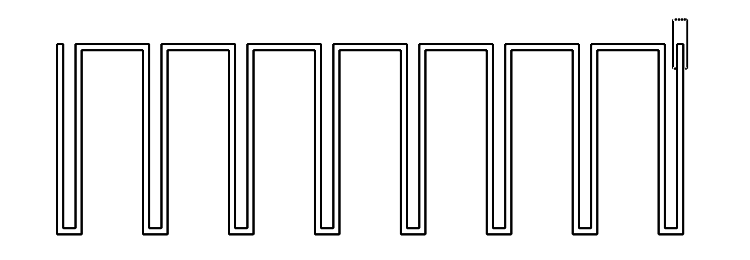
In order to make it easy to assemble the pneumatic network with the honeycomb structure, a column of airbags is divided into 16 individual chambers (as shown in the picture) by heat-sealed tortuous channels. Picture (B) shows the details of measurement and the design of two ends. 16 chambers can be divided into 8 segments, with every two adjacent segments connected through a long tortuous channel with a long air tube inside. Similarly, every two chambers in the same segment can be connected by a shorter tortuous channel with an air tube inside. For the air inlet, we use a straight connector to make it easy to inflate the pneumatic network. When assembling this pneumatic network with honeycomb structure, we can fold the pneumatic network from every short tortuous and plug it into every single chamber of honeycomb structure. The resulting AutoCAD files can be downloaded here. | 
| 
|
Bibliography
Jiang et al. (2016) Design and Simulation Analysis of a Soft Elastomer Manipulator based on Honeycomb Pneumatic Networks.
Sun et al. (2016) FLEXIBLE HONEYCOMB PNEUNETS ROBOTS.
Jiang et al. (2017) A Two-Level Approach for Solving the Inverse Kinematics of an Extensible Soft Arm Considering Viscoelastic Behavior.
Jiang et al. (2016) Design and Simulation Analysis of a Soft Manipulator Based on Honeycomb Pneumatic Networks.
Giri et al. (2010) Continuum robots and underactuated grasping
Grissom, et al. (2006) Design and experimental testing of the OctArm soft robot manipulator.
Contributors
Hao Jiang
Zhanchi Wang
Xinghua Liu
Xiaotong Chen
Yusong Jin
Hao Sun
Xiaoping Chen