Design
Inspiration
Honeycomb structures are masses of regularly arranged hexagonal prismatic wax cells constructed by honey bees in their nests for containing their larvae and storing honey and pollen.

A honeycomb shaped structure can provide a material with minimal density and relative high out-of-plane compression and shear properties. Engineers have applied the honeycomb structure to numerous engineering and scientific applications.
Inspired by the honeycomb, a novel structure coined 'honeycomb pneumatic network' was esablished as part of this actuator. Honeycomb has the property of high elongation rate and crush resistance, while the pneumatic networks system is lightweight, rapidly responsive and environmentally benign. HPN combines these properties by placing pneumatic units inside the honeycomb-shaped structure.
Design overview

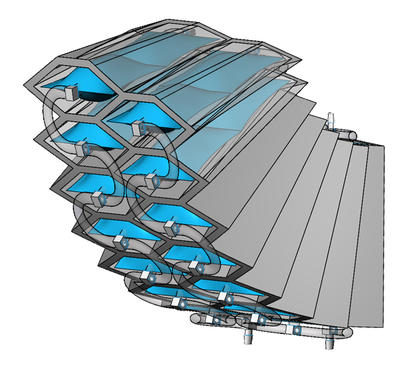
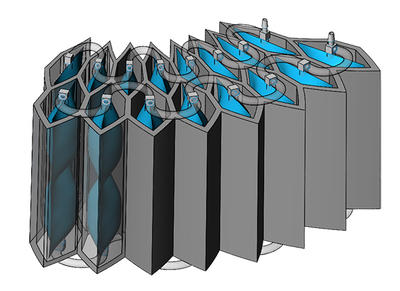
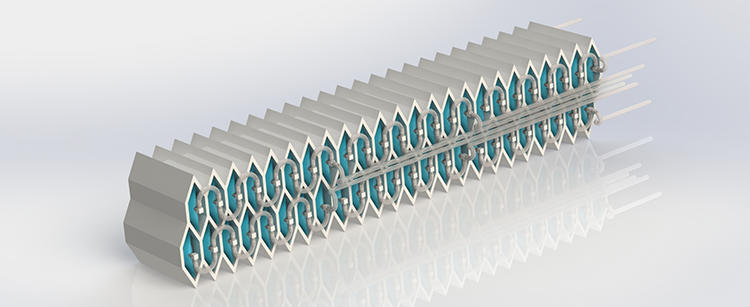
The HPN manipulator documented here consists of a honeycomb-shaped frame and a series of pneumatic networks arranged within. The manipulator can be constructed upon several segments with different parameters. Each segment contains four pneumatic network groups, each consisting of 8 chambers connected consecutively.
| 
|
Bibliography
Jiang et al. (2016) Design and Simulation Analysis of a Soft Elastomer Manipulator based on Honeycomb Pneumatic Networks.
Sun et al. (2016) FLEXIBLE HONEYCOMB PNEUNETS ROBOTS.
Jiang et al. (2017) A Two-Level Approach for Solving the Inverse Kinematics of an Extensible Soft Arm Considering Viscoelastic Behavior.
Jiang et al. (2016) Design and Simulation Analysis of a Soft Manipulator Based on Honeycomb Pneumatic Networks.
Giri et al. (2010) Continuum robots and underactuated grasping
Grissom, et al. (2006) Design and experimental testing of the OctArm soft robot manipulator.
Contributors
Hao Jiang
Zhanchi Wang
Xinghua Liu
Xiaotong Chen
Yusong Jin
Hao Sun
Xiaoping Chen