Trim
In this page, we trim the sketch using the Trim Entities operator based on last step. The result will be used for extrusion later.
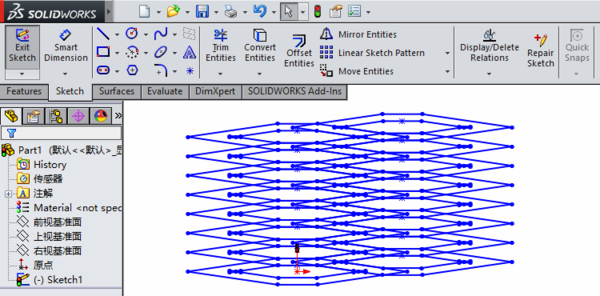
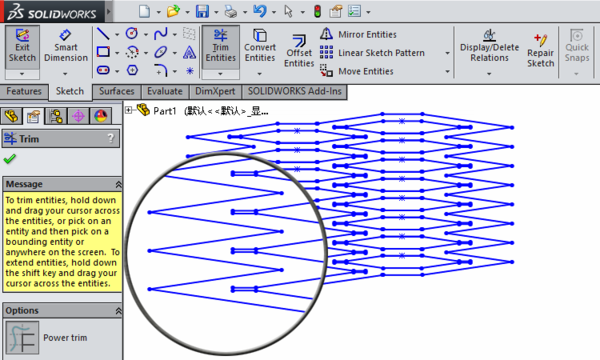
As shown below, we have drawn the sketch of the whole honeycomb structure.
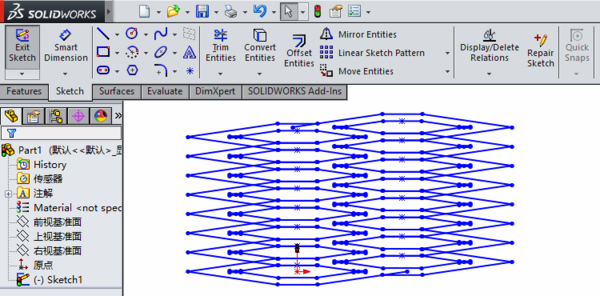
First, select redundant lines and delete them by clicking delete button on the keyboard. We need mention that the two lines on the upper and lower boundaries cannot be directly handled in this way.
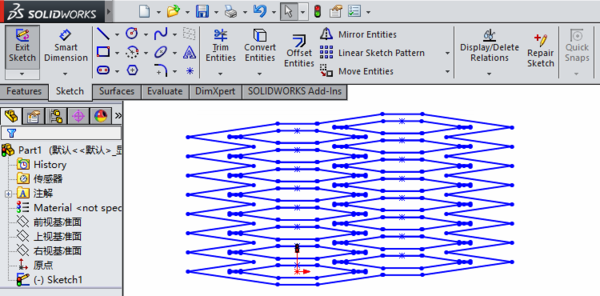
So we use Trim Entities operator to cut the extended area on the two lines at boundary.
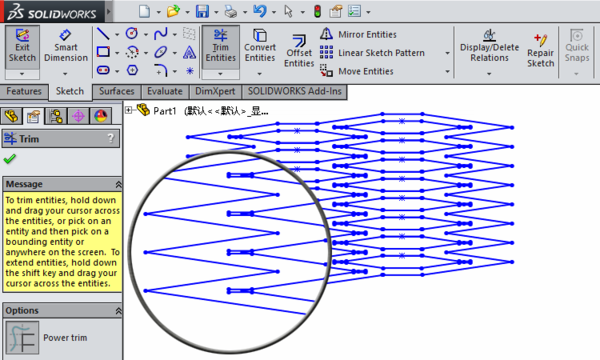
Then, we also use Trim Entities operator in order to cut the redundant lines at the inner grooves, which can be observed in a magnified view.

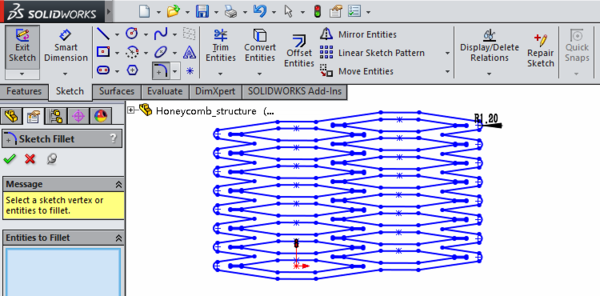
At last, we use Fillet operator and smooth the structure's two edges as seen below.
Bibliography
Jiang et al. (2016) Design and Simulation Analysis of a Soft Elastomer Manipulator based on Honeycomb Pneumatic Networks.
Sun et al. (2016) FLEXIBLE HONEYCOMB PNEUNETS ROBOTS.
Jiang et al. (2017) A Two-Level Approach for Solving the Inverse Kinematics of an Extensible Soft Arm Considering Viscoelastic Behavior.
Jiang et al. (2016) Design and Simulation Analysis of a Soft Manipulator Based on Honeycomb Pneumatic Networks.
Giri et al. (2010) Continuum robots and underactuated grasping
Grissom, et al. (2006) Design and experimental testing of the OctArm soft robot manipulator.
Contributors
Hao Jiang
Zhanchi Wang
Xinghua Liu
Xiaotong Chen
Yusong Jin
Hao Sun
Xiaoping Chen