Design Individual Chamber
There are many ways to make the honeycomb structure, in order to make it easy we will introduce it here step-by-step.
The general overview of steps entails first creating a fragment of one chamber, and complete it using symmetry operations. After that, the whole manipulator can be achieved by replication based on one chamber and patterning to achieve the network.
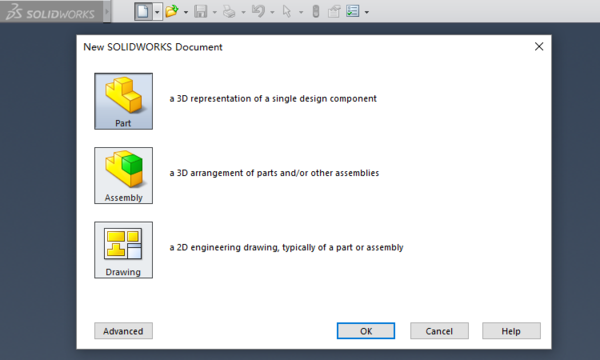
First step, launch Solidworks and create a new Part.
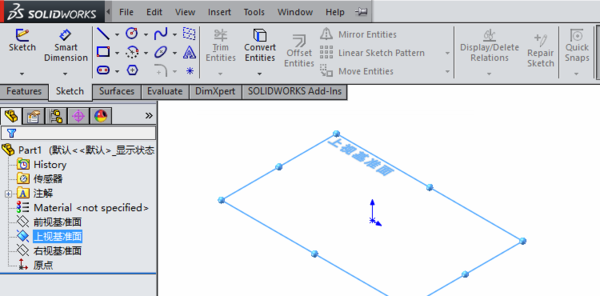
Next, select a datum plane and begin to sketch.
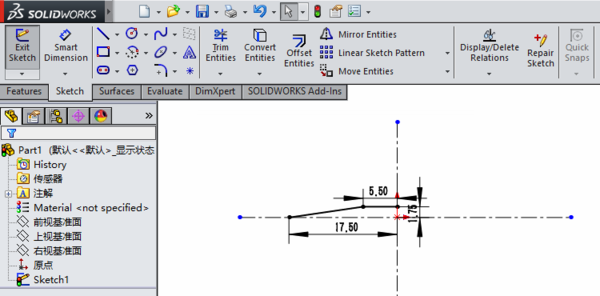
Next, we draw the sketch of a single honeycomb chamber. Because the chamber is a symmetrical hexagon, we only draw its quarter and then mirror it twice (using the Mirror Entities operator).
Now it's the sketch of one quarter of the hexagon shown below.
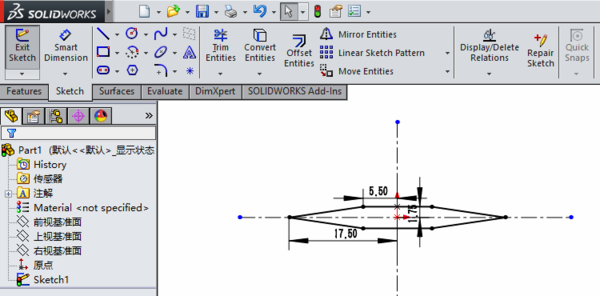
Mirror it for the first time, and we get the upper half of the hexagon.
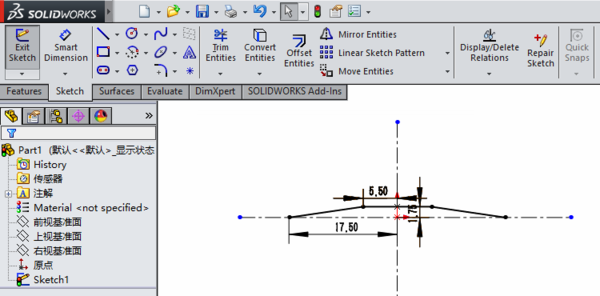
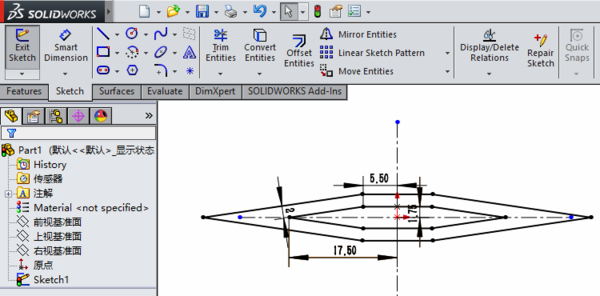
Mirror again, and we get the whole hexagon.
Then, we use the Offset Entities operator, with the distance of 2 mm, to get the chamber with desired thickness.
Bibliography
Jiang et al. (2016) Design and Simulation Analysis of a Soft Elastomer Manipulator based on Honeycomb Pneumatic Networks.
Sun et al. (2016) FLEXIBLE HONEYCOMB PNEUNETS ROBOTS.
Jiang et al. (2017) A Two-Level Approach for Solving the Inverse Kinematics of an Extensible Soft Arm Considering Viscoelastic Behavior.
Jiang et al. (2016) Design and Simulation Analysis of a Soft Manipulator Based on Honeycomb Pneumatic Networks.
Giri et al. (2010) Continuum robots and underactuated grasping
Grissom, et al. (2006) Design and experimental testing of the OctArm soft robot manipulator.
Contributors
Hao Jiang
Zhanchi Wang
Xinghua Liu
Xiaotong Chen
Yusong Jin
Hao Sun
Xiaoping Chen